Loading...
Searching...
No Matches
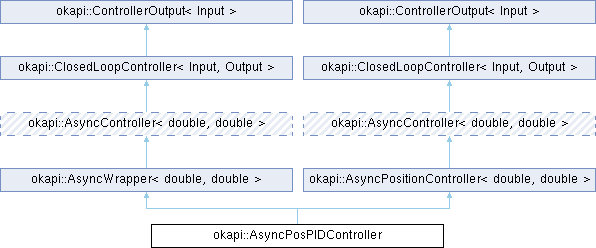
okapi::AsyncPosPIDController Class Reference
#include <asyncPosPidController.hpp>
Inheritance diagram for okapi::AsyncPosPIDController:
Public Member Functions | |
| AsyncPosPIDController (const std::shared_ptr< ControllerInput< double > > &iinput, const std::shared_ptr< ControllerOutput< double > > &ioutput, const TimeUtil &itimeUtil, double ikP, double ikI, double ikD, double ikBias=0, double iratio=1, std::unique_ptr< Filter > iderivativeFilter=std::make_unique< PassthroughFilter >(), const std::shared_ptr< Logger > &ilogger=Logger::getDefaultLogger()) | |
| An async position PID controller. | |
| AsyncPosPIDController (const std::shared_ptr< OffsetableControllerInput > &iinput, const std::shared_ptr< ControllerOutput< double > > &ioutput, const TimeUtil &itimeUtil, double ikP, double ikI, double ikD, double ikBias=0, double iratio=1, std::unique_ptr< Filter > iderivativeFilter=std::make_unique< PassthroughFilter >(), const std::shared_ptr< Logger > &ilogger=Logger::getDefaultLogger()) | |
| An async position PID controller. | |
| void | tarePosition () override |
| Sets the "absolute" zero position of the controller to its current position. | |
| void | setMaxVelocity (std::int32_t imaxVelocity) override |
| This implementation does not respect the maximum velocity. | |
| void | setGains (const IterativePosPIDController::Gains &igains) |
| Set controller gains. | |
| IterativePosPIDController::Gains | getGains () const |
| Gets the current gains. | |
 Public Member Functions inherited from okapi::AsyncWrapper< double, double > Public Member Functions inherited from okapi::AsyncWrapper< double, double > | |
| AsyncWrapper (const std::shared_ptr< ControllerInput< double > > &iinput, const std::shared_ptr< ControllerOutput< double > > &ioutput, const std::shared_ptr< IterativeController< double, double > > &icontroller, const Supplier< std::unique_ptr< AbstractRate > > &irateSupplier, const double iratio=1, std::shared_ptr< Logger > ilogger=Logger::getDefaultLogger()) | |
A wrapper class that transforms an IterativeController into an AsyncController by running it in another task. | |
| AsyncWrapper (AsyncWrapper< double, double > &&other)=delete | |
| AsyncWrapper< double, double > & | operator= (AsyncWrapper< double, double > &&other)=delete |
| ~AsyncWrapper () override | |
| void | setTarget (const double itarget) override |
| Sets the target for the controller. | |
| void | controllerSet (const double ivalue) override |
| Writes the value of the controller output. | |
| double | getTarget () override |
| Gets the last set target, or the default target if none was set. | |
| double | getProcessValue () const override |
| double | getOutput () const |
| Returns the last calculated output of the controller. | |
| double | getError () const override |
| Returns the last error of the controller. | |
| bool | isSettled () override |
| Returns whether the controller has settled at the target. | |
| void | setSampleTime (const QTime &isampleTime) |
| Set time between loops. | |
| void | setOutputLimits (const double imax, const double imin) |
| Set controller output bounds. | |
| void | setControllerSetTargetLimits (double itargetMax, double itargetMin) |
| Sets the (soft) limits for the target range that controllerSet() scales into. | |
| double | getMaxOutput () |
| Get the upper output bound. | |
| double | getMinOutput () |
| Get the lower output bound. | |
| void | reset () override |
| Resets the controller's internal state so it is similar to when it was first initialized, while keeping any user-configured information. | |
| void | flipDisable () override |
| Changes whether the controller is off or on. | |
| void | flipDisable (const bool iisDisabled) override |
| Sets whether the controller is off or on. | |
| bool | isDisabled () const override |
| Returns whether the controller is currently disabled. | |
| void | waitUntilSettled () override |
| Blocks the current task until the controller has settled. | |
| void | startThread () |
| Starts the internal thread. | |
| CrossplatformThread * | getThread () const |
| Returns the underlying thread handle. | |
| Public Member Functions inherited from okapi::ClosedLoopController< Input, Output > | |
| virtual | ~ClosedLoopController ()=default |
| virtual void | setTarget (Input itarget)=0 |
| Sets the target for the controller. | |
| Public Member Functions inherited from okapi::ControllerOutput< Input > | |
| virtual void | controllerSet (Input ivalue)=0 |
| Writes the value of the controller output. | |
Protected Attributes | |
| std::shared_ptr< OffsetableControllerInput > | offsettableInput |
| std::shared_ptr< IterativePosPIDController > | internalController |
| Protected Attributes inherited from okapi::AsyncWrapper< double, double > | |
| std::shared_ptr< Logger > | logger |
| Supplier< std::unique_ptr< AbstractRate > > | rateSupplier |
| std::shared_ptr< ControllerInput< double > > | input |
| std::shared_ptr< ControllerOutput< double > > | output |
| std::shared_ptr< IterativeController< double, double > > | controller |
| bool | hasFirstTarget |
| double | lastTarget |
| double | ratio |
| std::atomic_bool | dtorCalled |
| CrossplatformThread * | task |
Additional Inherited Members | |
| Protected Member Functions inherited from okapi::AsyncWrapper< double, double > | |
| void | loop () |
| virtual void | resumeMovement () |
| Resumes moving after the controller is reset. | |
| Static Protected Member Functions inherited from okapi::AsyncWrapper< double, double > | |
| static void | trampoline (void *context) |
Detailed Description
Definition at line 17 of file asyncPosPidController.hpp.
Constructor & Destructor Documentation
◆ AsyncPosPIDController() [1/2]
| okapi::AsyncPosPIDController::AsyncPosPIDController | ( | const std::shared_ptr< ControllerInput< double > > & | iinput, |
| const std::shared_ptr< ControllerOutput< double > > & | ioutput, | ||
| const TimeUtil & | itimeUtil, | ||
| double | ikP, | ||
| double | ikI, | ||
| double | ikD, | ||
| double | ikBias = 0, |
||
| double | iratio = 1, |
||
| std::unique_ptr< Filter > | iderivativeFilter = std::make_unique< PassthroughFilter >(), |
||
| const std::shared_ptr< Logger > & | ilogger = Logger::getDefaultLogger() |
||
| ) |
An async position PID controller.
- Parameters
-
iinput The controller input. Will be turned into an OffsettableControllerInput. ioutput The controller output. itimeUtil The TimeUtil. ikP The proportional gain. ikI The integral gain. ikD The derivative gain. ikBias The controller bias. iratio Any external gear ratio. iderivativeFilter The derivative filter.
◆ AsyncPosPIDController() [2/2]
| okapi::AsyncPosPIDController::AsyncPosPIDController | ( | const std::shared_ptr< OffsetableControllerInput > & | iinput, |
| const std::shared_ptr< ControllerOutput< double > > & | ioutput, | ||
| const TimeUtil & | itimeUtil, | ||
| double | ikP, | ||
| double | ikI, | ||
| double | ikD, | ||
| double | ikBias = 0, |
||
| double | iratio = 1, |
||
| std::unique_ptr< Filter > | iderivativeFilter = std::make_unique< PassthroughFilter >(), |
||
| const std::shared_ptr< Logger > & | ilogger = Logger::getDefaultLogger() |
||
| ) |
An async position PID controller.
- Parameters
-
iinput The controller input. ioutput The controller output. itimeUtil The TimeUtil. ikP The proportional gain. ikI The integral gain. ikD The derivative gain. ikBias The controller bias. iratio Any external gear ratio. iderivativeFilter The derivative filter.
Member Function Documentation
◆ getGains()
| IterativePosPIDController::Gains okapi::AsyncPosPIDController::getGains | ( | ) | const |
Gets the current gains.
- Returns
- The current gains.
◆ setGains()
| void okapi::AsyncPosPIDController::setGains | ( | const IterativePosPIDController::Gains & | igains | ) |
Set controller gains.
- Parameters
-
igains The new gains.
◆ setMaxVelocity()
|
overridevirtual |
This implementation does not respect the maximum velocity.
- Parameters
-
imaxVelocity Ignored.
Implements okapi::AsyncPositionController< double, double >.
◆ tarePosition()
|
overridevirtual |
Sets the "absolute" zero position of the controller to its current position.
Implements okapi::AsyncPositionController< double, double >.
Member Data Documentation
◆ internalController
|
protected |
Definition at line 98 of file asyncPosPidController.hpp.
◆ offsettableInput
|
protected |
Definition at line 97 of file asyncPosPidController.hpp.
The documentation for this class was generated from the following file:
- include/okapi/api/control/async/asyncPosPidController.hpp