An abstract closed-loop controller. More...
#include <closedLoopController.hpp>
Public Member Functions | |
| virtual | ~ClosedLoopController ()=default |
| virtual void | setTarget (Input itarget)=0 |
| Sets the target for the controller. | |
| virtual Input | getTarget ()=0 |
| Gets the last set target, or the default target if none was set. | |
| virtual Input | getProcessValue () const =0 |
| virtual Output | getError () const =0 |
| Returns the last error of the controller. | |
| virtual bool | isSettled ()=0 |
| Returns whether the controller has settled at the target. | |
| virtual void | reset ()=0 |
| Resets the controller's internal state so it is similar to when it was first initialized, while keeping any user-configured information. | |
| virtual void | flipDisable ()=0 |
| Changes whether the controller is off or on. | |
| virtual void | flipDisable (bool iisDisabled)=0 |
| Sets whether the controller is off or on. | |
| virtual bool | isDisabled () const =0 |
| Returns whether the controller is currently disabled. | |
 Public Member Functions inherited from okapi::ControllerOutput< Input > Public Member Functions inherited from okapi::ControllerOutput< Input > | |
| virtual void | controllerSet (Input ivalue)=0 |
| Writes the value of the controller output. | |
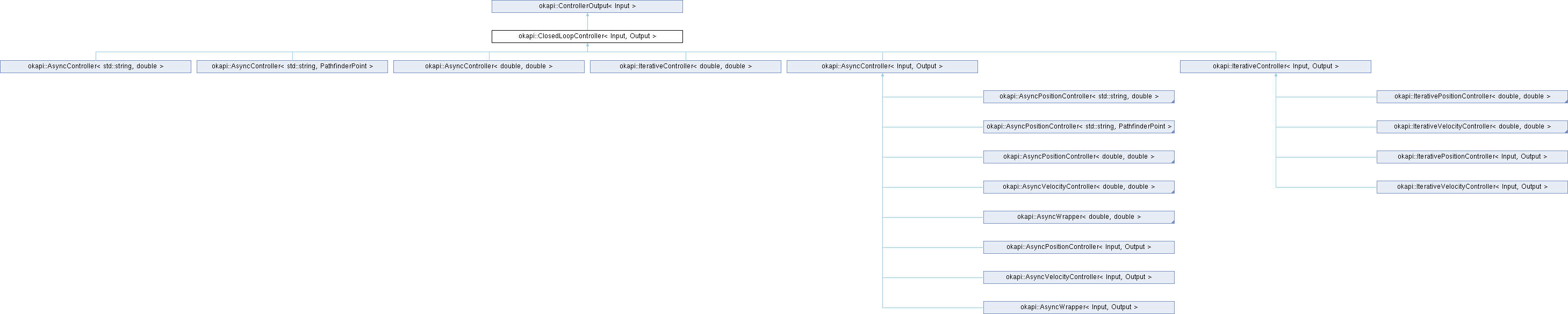
Detailed Description
class okapi::ClosedLoopController< Input, Output >
An abstract closed-loop controller.
- Template Parameters
-
Input The target/input type. Output The error/output type.
Definition at line 19 of file closedLoopController.hpp.
Constructor & Destructor Documentation
◆ ~ClosedLoopController()
|
virtualdefault |
Member Function Documentation
◆ flipDisable() [1/2]
|
pure virtual |
Changes whether the controller is off or on.
Turning the controller on after it was off will cause the controller to move to its last set target, unless it was reset in that time.
Implemented in okapi::AsyncLinearMotionProfileController, okapi::AsyncMotionProfileController, okapi::AsyncPosIntegratedController, okapi::AsyncVelIntegratedController, okapi::AsyncWrapper< Input, Output >, okapi::AsyncWrapper< double, double >, okapi::IterativeMotorVelocityController, okapi::IterativePosPIDController, and okapi::IterativeVelPIDController.
◆ flipDisable() [2/2]
|
pure virtual |
Sets whether the controller is off or on.
Turning the controller on after it was off will cause the controller to move to its last set target, unless it was reset in that time.
- Parameters
-
iisDisabled whether the controller is disabled
Implemented in okapi::AsyncLinearMotionProfileController, okapi::AsyncMotionProfileController, okapi::AsyncPosIntegratedController, okapi::AsyncVelIntegratedController, okapi::IterativeMotorVelocityController, okapi::IterativePosPIDController, okapi::IterativeVelPIDController, okapi::AsyncWrapper< Input, Output >, and okapi::AsyncWrapper< double, double >.
◆ getError()
|
pure virtual |
Returns the last error of the controller.
Does not update when disabled.
- Returns
- the last error
Implemented in okapi::AsyncLinearMotionProfileController, okapi::AsyncMotionProfileController, okapi::AsyncPosIntegratedController, okapi::AsyncVelIntegratedController, okapi::AsyncWrapper< Input, Output >, okapi::AsyncWrapper< double, double >, okapi::IterativeMotorVelocityController, okapi::IterativePosPIDController, and okapi::IterativeVelPIDController.
◆ getProcessValue()
|
pure virtual |
- Returns
- The most recent value of the process variable.
Implemented in okapi::AsyncLinearMotionProfileController, okapi::AsyncMotionProfileController, okapi::AsyncPosIntegratedController, okapi::AsyncVelIntegratedController, okapi::AsyncWrapper< Input, Output >, okapi::AsyncWrapper< double, double >, okapi::IterativeMotorVelocityController, okapi::IterativePosPIDController, and okapi::IterativeVelPIDController.
◆ getTarget()
|
pure virtual |
Gets the last set target, or the default target if none was set.
- Returns
- the last target
Implemented in okapi::AsyncLinearMotionProfileController, okapi::AsyncMotionProfileController, okapi::AsyncPosIntegratedController, okapi::AsyncVelIntegratedController, okapi::AsyncWrapper< Input, Output >, okapi::AsyncWrapper< double, double >, okapi::IterativeMotorVelocityController, okapi::IterativePosPIDController, and okapi::IterativeVelPIDController.
◆ isDisabled()
|
pure virtual |
Returns whether the controller is currently disabled.
- Returns
- whether the controller is currently disabled
Implemented in okapi::AsyncLinearMotionProfileController, okapi::AsyncMotionProfileController, okapi::AsyncPosIntegratedController, okapi::AsyncVelIntegratedController, okapi::AsyncWrapper< Input, Output >, okapi::AsyncWrapper< double, double >, okapi::IterativeMotorVelocityController, okapi::IterativePosPIDController, and okapi::IterativeVelPIDController.
◆ isSettled()
|
pure virtual |
Returns whether the controller has settled at the target.
Determining what settling means is implementation-dependent.
If the controller is disabled, this method must return true.
- Returns
- whether the controller is settled
Implemented in okapi::AsyncLinearMotionProfileController, okapi::AsyncMotionProfileController, okapi::AsyncPosIntegratedController, okapi::AsyncVelIntegratedController, okapi::AsyncWrapper< Input, Output >, okapi::AsyncWrapper< double, double >, okapi::IterativeMotorVelocityController, okapi::IterativePosPIDController, and okapi::IterativeVelPIDController.
◆ reset()
|
pure virtual |
Resets the controller's internal state so it is similar to when it was first initialized, while keeping any user-configured information.
Implemented in okapi::AsyncLinearMotionProfileController, okapi::AsyncMotionProfileController, okapi::AsyncPosIntegratedController, okapi::AsyncVelIntegratedController, okapi::AsyncWrapper< Input, Output >, okapi::AsyncWrapper< double, double >, okapi::IterativeMotorVelocityController, okapi::IterativePosPIDController, and okapi::IterativeVelPIDController.
◆ setTarget()
|
pure virtual |
Sets the target for the controller.
- Parameters
-
itarget the new target
Implemented in okapi::AsyncWrapper< Input, Output >.
The documentation for this class was generated from the following file:
- include/okapi/api/control/closedLoopController.hpp