Loading...
Searching...
No Matches
okapi::AsyncVelocityController< Input, Output > Class Template Reference
#include <asyncVelocityController.hpp>
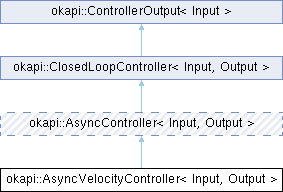
Inheritance diagram for okapi::AsyncVelocityController< Input, Output >:
Additional Inherited Members | |
 Public Member Functions inherited from okapi::AsyncController< Input, Output > Public Member Functions inherited from okapi::AsyncController< Input, Output > | |
| virtual void | waitUntilSettled ()=0 |
| Blocks the current task until the controller has settled. | |
| Public Member Functions inherited from okapi::ClosedLoopController< Input, Output > | |
| virtual | ~ClosedLoopController ()=default |
| virtual void | setTarget (Input itarget)=0 |
| Sets the target for the controller. | |
| virtual Input | getTarget ()=0 |
| Gets the last set target, or the default target if none was set. | |
| virtual Input | getProcessValue () const =0 |
| virtual Output | getError () const =0 |
| Returns the last error of the controller. | |
| virtual bool | isSettled ()=0 |
| Returns whether the controller has settled at the target. | |
| virtual void | reset ()=0 |
| Resets the controller's internal state so it is similar to when it was first initialized, while keeping any user-configured information. | |
| virtual void | flipDisable ()=0 |
| Changes whether the controller is off or on. | |
| virtual void | flipDisable (bool iisDisabled)=0 |
| Sets whether the controller is off or on. | |
| virtual bool | isDisabled () const =0 |
| Returns whether the controller is currently disabled. | |
| Public Member Functions inherited from okapi::ControllerOutput< Input > | |
| virtual void | controllerSet (Input ivalue)=0 |
| Writes the value of the controller output. | |
Detailed Description
template<typename Input, typename Output>
class okapi::AsyncVelocityController< Input, Output >
class okapi::AsyncVelocityController< Input, Output >
Definition at line 13 of file asyncVelocityController.hpp.
The documentation for this class was generated from the following file:
- include/okapi/api/control/async/asyncVelocityController.hpp