Loading...
Searching...
No Matches
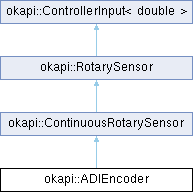
okapi::ADIEncoder Class Reference
#include <adiEncoder.hpp>
Inheritance diagram for okapi::ADIEncoder:
Public Member Functions | |
| ADIEncoder (std::uint8_t iportTop, std::uint8_t iportBottom, bool ireversed=false) | |
| An encoder in an ADI port. | |
| ADIEncoder (std::tuple< std::uint8_t, std::uint8_t, std::uint8_t > iports, bool ireversed=false) | |
| An encoder in an ADI port. | |
| virtual double | get () const override |
| Get the current sensor value. | |
| virtual std::int32_t | reset () override |
| Reset the sensor to zero. | |
| virtual double | controllerGet () override |
| Get the sensor value for use in a control loop. | |
 Public Member Functions inherited from okapi::RotarySensor Public Member Functions inherited from okapi::RotarySensor | |
| virtual | ~RotarySensor () |
Protected Attributes | |
| pros::c::ext_adi_encoder_t | enc |
Detailed Description
Definition at line 12 of file adiEncoder.hpp.
Constructor & Destructor Documentation
◆ ADIEncoder() [1/2]
| okapi::ADIEncoder::ADIEncoder | ( | std::uint8_t | iportTop, |
| std::uint8_t | iportBottom, | ||
| bool | ireversed = false |
||
| ) |
An encoder in an ADI port.
Definition adiEncoder.hpp:12
- Parameters
-
iportTop The "top" wire from the encoder with the removable cover side up. This must be in port 1,3,5, or7(A,C,E, orG).iportBottom The "bottom" wire from the encoder. This must be in port 2,4,6, or8(B,D,F, orH).ireversed Whether the encoder is reversed.
◆ ADIEncoder() [2/2]
| okapi::ADIEncoder::ADIEncoder | ( | std::tuple< std::uint8_t, std::uint8_t, std::uint8_t > | iports, |
| bool | ireversed = false |
||
| ) |
An encoder in an ADI port.
- Parameters
-
iports The ports the encoder is plugged in to in the order {smart port, top port, bottom port}. The smart port is the smart port number ([1, 21]). The top port is the "top" wire from the encoder with the removable cover side up. This must be in port1,3,5, or7(A,C,E, orG). The bottom port is the "bottom" wire from the encoder. This must be in port2,4,6, or8(B,D,F, orH).ireversed Whether the encoder is reversed.
Member Function Documentation
◆ controllerGet()
|
overridevirtual |
Get the sensor value for use in a control loop.
This method might be automatically called in another thread by the controller.
- Returns
- the current sensor value, or
PROS_ERRon a failure.
Implements okapi::ControllerInput< double >.
◆ get()
|
overridevirtual |
Get the current sensor value.
- Returns
- the current sensor value, or
PROS_ERRon a failure.
Implements okapi::RotarySensor.
◆ reset()
|
overridevirtual |
Reset the sensor to zero.
- Returns
1on success,PROS_ERRon fail
Implements okapi::ContinuousRotarySensor.
Member Data Documentation
◆ enc
|
protected |
Definition at line 71 of file adiEncoder.hpp.
The documentation for this class was generated from the following file:
- include/okapi/impl/device/rotarysensor/adiEncoder.hpp