Loading...
Searching...
No Matches
okapi::ReadOnlyChassisModel Class Referenceabstract
A version of the ChassisModel that only supports read methods, such as querying sensor values. More...
#include <readOnlyChassisModel.hpp>
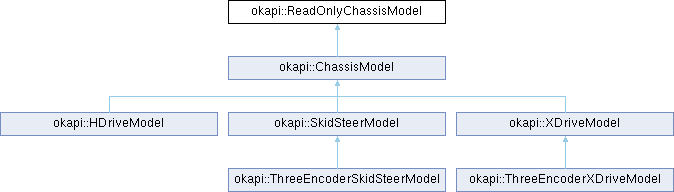
Inheritance diagram for okapi::ReadOnlyChassisModel:
Public Member Functions | |
| virtual | ~ReadOnlyChassisModel ()=default |
| virtual std::valarray< std::int32_t > | getSensorVals () const =0 |
| Read the sensors. | |
Detailed Description
A version of the ChassisModel that only supports read methods, such as querying sensor values.
This class does not let you write to motors, so it supports having multiple owners and as a result copying is enabled.
Definition at line 17 of file readOnlyChassisModel.hpp.
Constructor & Destructor Documentation
◆ ~ReadOnlyChassisModel()
|
virtualdefault |
Member Function Documentation
◆ getSensorVals()
|
pure virtual |
Read the sensors.
- Returns
- sensor readings (format is implementation dependent)
Implemented in okapi::HDriveModel, okapi::SkidSteerModel, okapi::ThreeEncoderSkidSteerModel, okapi::ThreeEncoderXDriveModel, and okapi::XDriveModel.
The documentation for this class was generated from the following file:
- include/okapi/api/chassis/model/readOnlyChassisModel.hpp